Each LIGO interferometer (and any others like Virgo and KAGRA) is an omnidirectional detector, in that it is sensitive to GWs coming from almost any direction.
The LIGO detectors are more like ears than eyes.
An EM telescope (light, radio, etc.) is sensitive only to the direction it is pointed, much like our eyes.
Being sensitive in that direction doesn't give you all of the information about the source of the EM waves, for example how far away they came from.
To measure distance with our eyes we need a reference to compare against or we can combine the signal from both eyes and use the parallax to gain depth perception.
Our ears can sense sound coming from any direction, but we cannot figure out where it came from perfectly.
Using two ears you can localize the source better, by using the time delay between them.
But like LIGO if a sound is heard in both ears simultaneously it could be coming from directly behind or above (or even in front, although our eyes might help there).
A two interferometer array like LIGO can use the time delay between the two detectors to localize a source to a ring on the sky.
Because of uncertainty in the measured time of arrival, these rings are broadened a bit.
Because the two detectors aren't quite coplanar, they are not equally sensitive in all of the same directions.
The relative amplitude observed in the two detectors can further help the sky localization.
This is why some point of origin sky maps show two disconnected pieces of the same ring.
The bigger the amplitude of the signal, the easier it is to detect this amplitude difference.
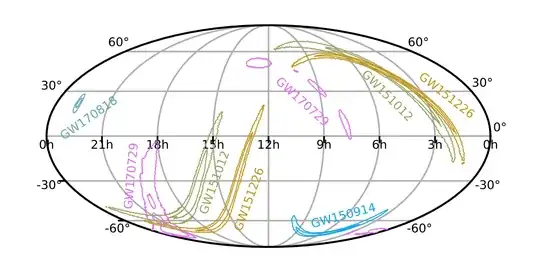
In the sky localization summary above from LIGO/Virgo's first gravitational wave transient catalogue (GWTC-1) you can see these effects.
GW151012 and GW151226 both have disjoint ring segments.
The higher amplitude GW150914 has a single ring segment.
The higher amplitude signal carries more relative amplitude information when you compare the signal from the two detectors.
GW170818 was detected by both LIGO detectors and Virgo in Italy.
This signal can be fully triangulated to a single point (smudged out due to the time of arrival uncertainty).
A single ($x$,$y$) interferometer provides no information about the direction of origin of a GW signal other than its non-uniform amplitude sensitivity.
This is not terribly useful, as a low amplitude detection could correspond to either an intrinsically high amplitude source in a low sensitivity sky location or an intrinsically low amplitude source in a high sensitivity sky location.
Using a three arm detector, one could form 3 interferometry channels: ($x$,$y$), ($x$,$z$), ($y$,$z$).
Each channel would carry basically no source localization, but we could combine them.
The time delay information would be hard to use, as the detectors are nearly colocated.
Because the orientation of each interferometer is very different, the relative amplitude information could be used to localize a source.
This is in some sense the opposite of the LIGO design, where the two interferometers are widely separated by nearly co-planar.
The single three arm detector might also have noise issues, as local disturbances could affect all three interferometry channels increasing the risk of false positives.

