This regime is very unintuitive and it is indeed seen very rarely in physics, though some superconducting circuits do follow a similar equation. It is complicated to deal with mathematically, as taking the limit of $m\to0$ changes the character of the ODE, but it can be done if you're careful about it. This limit is most easily understood by the principle that the particle is always travelling at the local terminal velocity.
To make this precise, consider the general equation you pose,
$$
m\ddot x+b\dot x=F(x).\tag1
$$
Imagine, to begin with, that $F\equiv F_0$ is constant over some stretch of $x$. The general solution is then of the form
$$x(t)=\frac {F_0}b t+x(0)-\frac mb e^{-\frac bm t}\left(\dot x(0)-\frac{F_0}b\right),$$
and it has two constants of integration, $x(0)$ and $\dot x(0)$, as corresponds to a second-order ODE. However, if the particle is very light (thought this limit is, and will be throughout, very hard to take, as $m$ carries dimensional information), then the second term becomes negligible. For one, it gets multiplied by a very small constant, so it gets smaller and smaller. Most importantly, though, the relaxation time of the exponential, $\tau=m/b$, becomes very short. This means that unless you have very sensitive time resolution, by the time you observe the particle, it will have relaxed into the terminal velocity $v_0=F_0/b$.
The same principle applies if the particle now crosses into a region that has a somewhat different force $F\equiv F_1$. The particle will take some time $\sim\tau$ to relax into the new terminal velocity, $v_1=F_1/b$, during which time the second-order character of the driving ODE will be observable, but after that all you'll see is motion at the terminal velocity.
Similarly, if $F(x)$ is some "slow" function of position, then the particle will always relax into the local terminal velocity before you've had time to realize that it does have some inertia with which to fight the 'air resistance' provided by $b$.
I know of no mechanical system where such a simplified equation could be expected to hold. If you took a mechanical particle subject to electrostatic, magnetic, gravitational, dipolar, or other such external forces, and made the mass very small, then the granularity of the medium providing the damping would become evident much before you reached this regime. Instead, you'd observe Brownian motion.
On the other hand, there is a model for superconducting circuits, and in particular for Josephson junctions in certain circumstances, that does follow this equation. This model is known as the resistively-capacitively shunted junction (RCSJ) model, and you can find OK expositions of it here and here.
Essentially, a Josephson junction is a very thin layer of insulating material in between two superconductors. The current through the junction, because of quantum mechanical effects, is given in certain regimes by
$$I=I_C\sin\varphi,$$
where $I_C$ is a critical current and $\varphi$ is the phase difference between the wavefunctions of the Cooper pair condensates on either side, which grows at a rate governed by the voltage $V=\frac\hbar {q_e}\dot\varphi$ across the junction.
On the other hand, any Josephson junction still has some finite resistance (through nontrivial effects) and a very small capacitance. The simplest model that captures this is to put all three in parallel:
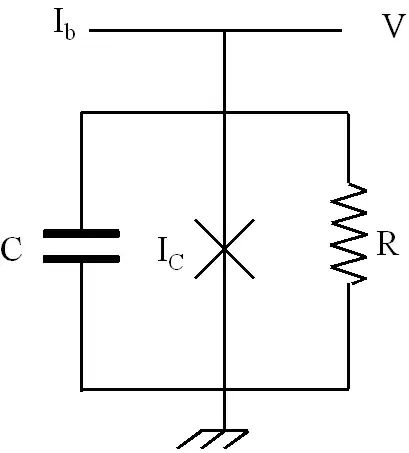
(Image source)
The current through the resistor is $I=V/R=\cfrac\hbar{q_eR}\dot\varphi$, whereas the current through the capacitor is $I=\dot Q=C\dot V=\cfrac{C\hbar}{q_e}\ddot\varphi$. If you hook up all three elements to a current source at current $I_0$, you'll get an equation of the form
$$I_0=I_C\sin(\varphi)+\cfrac\hbar{q_eR}\dot\varphi+\cfrac{C\hbar}{q_e}\ddot\varphi,$$
and this is of the form (1), where the force is provided by a 'tilted washboard' potential.
As it happens, the relevant limit for this equation is the overdamped case, because the "mass", $\frac{\hbar}{q_e}C$, is proportional to the capacitance, and while this is nonzero it is often (but not always) extremely tiny. Thus, you can make a mechanical analogy for this circuit, interpreting the phase $\varphi$ as the position of a 'particle', and here the inertia is often negligible.
{kind=link}